Техника и вооружение 2007 07 - Коллектив авторов (читать книги онлайн полностью без регистрации .txt) 📗
Третьим основным прибором был гироинтегратор — двухстепенной гироскоп со смещенным центром тяжести, величина отклонения оси которого от исходного положения была прямо пропорциональна так называемой «кажущейся скорости» — интегралу от ускорения ракеты за вычетом составляющей, обусловленной действием гравитации. При достижении заданного значения кажущейся скорости двигатель отключался, чем и регулировалась дальность стрельбы.
Помимо сигналов с гироприборов системы ракеты должны были отрабатывать многочисленные разовые команды, которые вырабатывались программным токораспределителем — вращающимся профилированным валиком, на поверхности которого располагалось множество контактов. Преобразование слабых сигналов в достаточно мощные электрические токи и их рассылка по потребителям осуществлялись посредством усилителя-преобразователя, а также так называемого главного токораспределителя — совокупности множества релейных устройств, подобной оборудованию телефонных коммутаторов той эпохи.
Все эти приборы позволяли вырабатывать соответствующие электрические команды, но для физического изменения ориентации ракеты требовались исполнительные органы управления. Хорошо освоенные авиацией тех лет аэродинамические рули были бесполезны на начальном участке полета при малых скоростных напорах. Однако еще до отрыва ракеты от стартового стола, с момента включения двигателя из сопла истекал мощный поток продуктов сгорания. Естественным представлялось ввести рули в эту струю. Разумеется, такие рули, будь они выполнены из алюминия и даже стали, сгорели бы за пару секунд. Поэтому для экспериментальных ракет А-3 создали молибденовые газовые рули, функционирующие в потоке продуктов сгорания двигателя на протяжении всего времени его работы. Еще до изготовления первой «Фау-2» взамен дефицитного (особенно в военных условиях) молибдена применили графит, одновременно стократно удешевив эти изделия. От привычных аэродинамических рулей они отличались помимо естественного для графита черного цвета большой толщиной и относительно малыми размерами: конструкторы стремились снизить потери удельного импульса от присутствия посторонних тел на пути струи. Поэтому на участке действия максимальных скоростных напоров эффективности газовых рулей не хватало, и в дополнение к ним на ракете установили аэродинамические рули, разместив их на задней кромке крупноразмерных стреловидных стабилизаторов. Сами эти стабилизаторы должны были обеспечить так называемую статическую устойчивость ракеты на всех этапах полета — от старта до входа в атмосферу перед падением на цель.
Для задействования органов управления использовались электрогидравлические машинки: электромагнитные клапаны распределяли поток масла между цилиндрами, в которых под его давлением перемещались поршни, связанные с рулями. Кинематическая связь рулевой машинки с аэродинамическим рулем обеспечивалась цепной передачей, с детства знакомой каждому по велосипедам и смотревшейся очень неожиданно на таком фантастическом тому времени летательном аппарате.
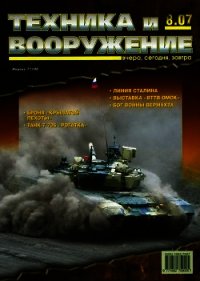
После старта ракета в течение 4,5 с летела вертикально, а затем разворачивалась в сторону цели, на которую указывал стабилизатор № 1. Современные ракеты обладают значительными возможностями маневра, но по-прежнему в качестве номинального положение принимается ориентация базовой плоскостью I в направлении цели.
На высоте около 10 км А-4 на 25-й секунде полета преодолевала звуковой барьер. Спустя еще 35 с на высоте около 40 км по команде системы управления двигатель отключался, после чего набравшая скорость 1600 м/с ракета летела к цели, набирая высоту до 80–90 км.
Выбор жидкого топлива определил наличие на ракете крупноразмерных баков горючего и окислителя, занимающих большую часть ее объема. Нетривиальным решением стало размещение этих баков, выполненных из алюминиевых сплавов, внутри наружного силового корпуса. Ведь даже в трудах первых теоретиков ракетостроения предусматривалось применение так называемых несущих баков, образующих внешнюю поверхность ракеты и воспринимающих действующую на ракету нагрузки. По такой «несущей» схеме были выполнены и предшествующие А-4 относительно малогабаритные экспериментальные ракеты.
Использование на «Фау-2» схемы с подвесными баками и силового корпуса до настоящего времени не нашло однозначного объяснения. Видимо, сказались авиационные традиции — отдельное от фюзеляжа самолета конструктивное исполнение топливных баков и стремление поэлементно решать проблемы — обеспечить герметичность при производстве баков и добиться прочности и устойчивости при изготовлении корпуса. Определяющим фактором стала оптимальность такой конструктивной схемы при воздействии мощных нагрузок при входе в атмосферу и подходе к цели.

Траектория полета ракеты А-4.


Схема расположения газоструйных и воздушных рулей баллистической ракеты А-4.
При относительно низкой тяговооруженности (тяга двигателя всего в 2 раза превышала вес ракеты) для А-4 мог быть реализован только вертикальный старт. Стартовый стол включал установленное на четырех стойках массивное кольцо, на которое опирались стабилизаторы ракеты. Под кольцом находился газоотражатель, рассекающий струю продуктов сгорания и направляющий ее в стороны от оси ракеты. Для обеспечения охлаждения он заполнялся водой, испарявшейся в процессе старта. После отвода стрелы вдоль ракеты располагалась кабель-мачта, отбрасываемая непосредственно перед пуском.
Весившая 12,8 т ракета А-4 имела длину 14,3 м (по другим данным- 14,036 м), диаметр 1,65 м и размах 3,555 м, по габаритам многократно превышая все ранее созданные серийные образцы ракетной техники.
Продолжение следует
Шаг за шагом
Ю.Н. Ерофеев, д.т.н., профессор
Продолжение.
Начало см. в «ТиВ» № 7–9,11,12/2006 г. № 1,2,4,5/2007 г.

Иван Федорович Иванов (1926 г.р.), к.т.н., лауреат Государственной премии СССР, заслуженный изобретатель Российской Федерации, почетный радист. Фото 1965 г.
Совещание в Военно- промышленной комиссии
В публикации [1], с которой, надо понимать, и началась цепочка открытых сообщений об этой области радиолокации, приводится такая сцена: «В 1975 г. в высший правительственный орган того периода, который ведал постановкой и контролем за разработкой в стране, были вызваны директора и некоторые главные конструкторы ведущих институтов МРП. Был задан вопрос: «Кто знает о том, что такое нелинейная радиолокация? У кого есть какие-либо сведения об этой области?» Ответом было общее молчание, которое после достаточно выразительной паузы было прервано только Ю.Н. Мажоровым: «У нас есть результаты исследований и опытно-конструкторских проработок. После разрешения заказчика можем привести конкретные данные». Позднее выяснилось, что в постановке разработок по нелинейной радиолокации был заинтересован ряд главков заказчика».
Сейчас, через много лет после «Беловежского соглашения» и развала СССР, даются пояснения, что «высшим правительственным органом того периода» была, конечно, Комиссия по военно-промышленным вопросам при Президиуме Совета Министров СССР, ВПК [2]; председатель ВПК Л.В. Смирнов проводил указанное совещание и поставил озвученный вопрос. Профессор Ю.Н. Мажоров, генерал-майор ИТС — Генеральный директор НПО «Пальма», ставшего после смерти министра радиопромышленности СССР П.С. Плешакова в 1987 г. — НПО им. П.С. Плешакова. Его умение кратко и четко изложить существо проблемы, основные результаты проведенных научных исследований на заседаниях самого высокого уровня — ив ВПК, и при докладах правительству — не раз отмечалось в литературе [3].